Hello worldDeploying cross-language in high impact projects
Robin Lovelace 
University of Leeds, Active Travel England
January 23, 2025
Case study for reference
The Network Planning Tool for Scotland
- Development version (branch
dev): nptscot.github.io - Stable version (branch
production): www.npt.scot
NPT stack
Backend: R + targets for ‘cross-language’ data pipeline workflow automation
- Relies on Rust crates
- Experiments with Python
Frontend: JS + MapLibre for visualisation
Progressive Web App (PWA)
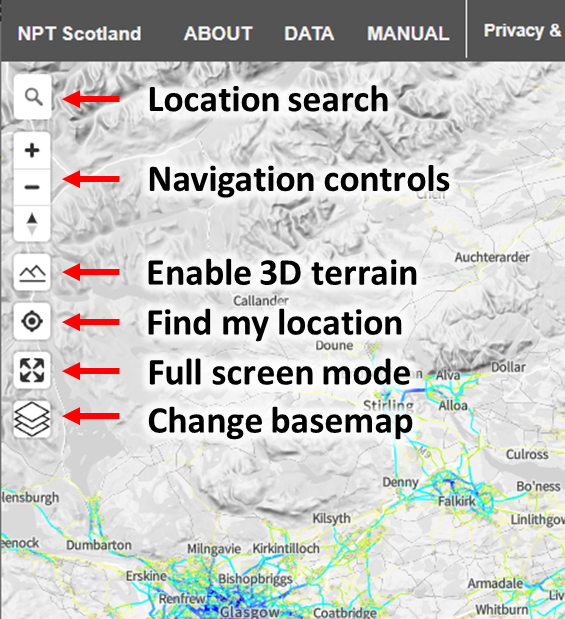
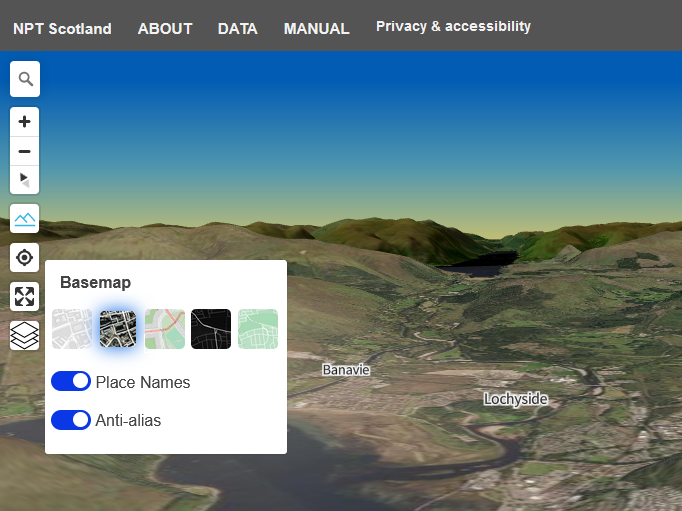
User interface
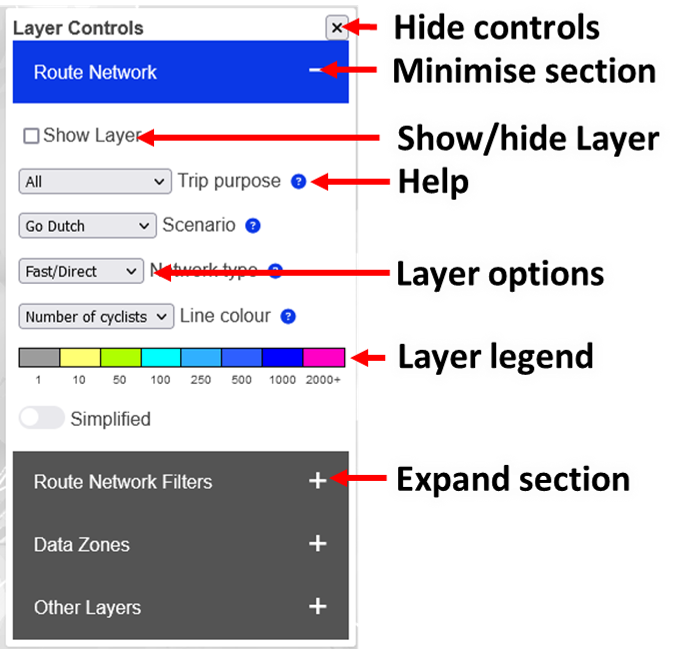
Layer Controls
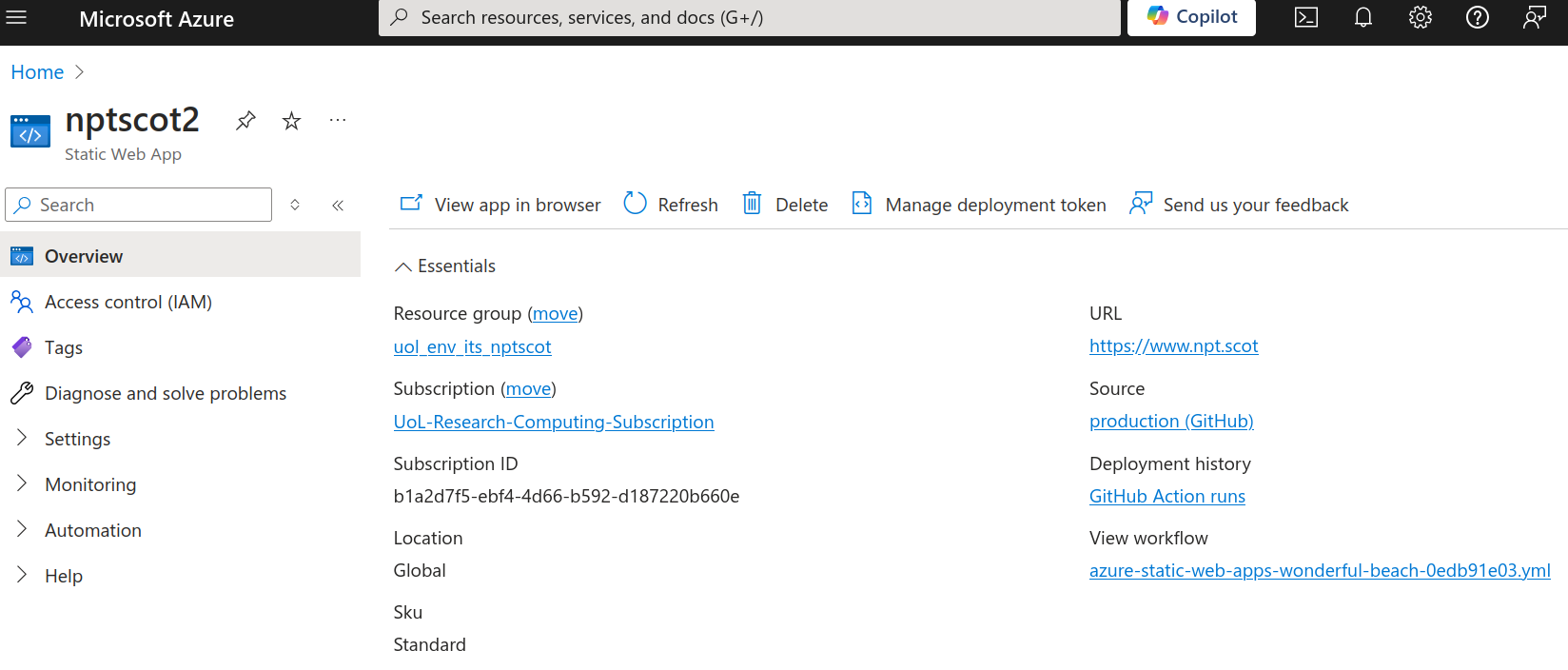
Deploying the NPT
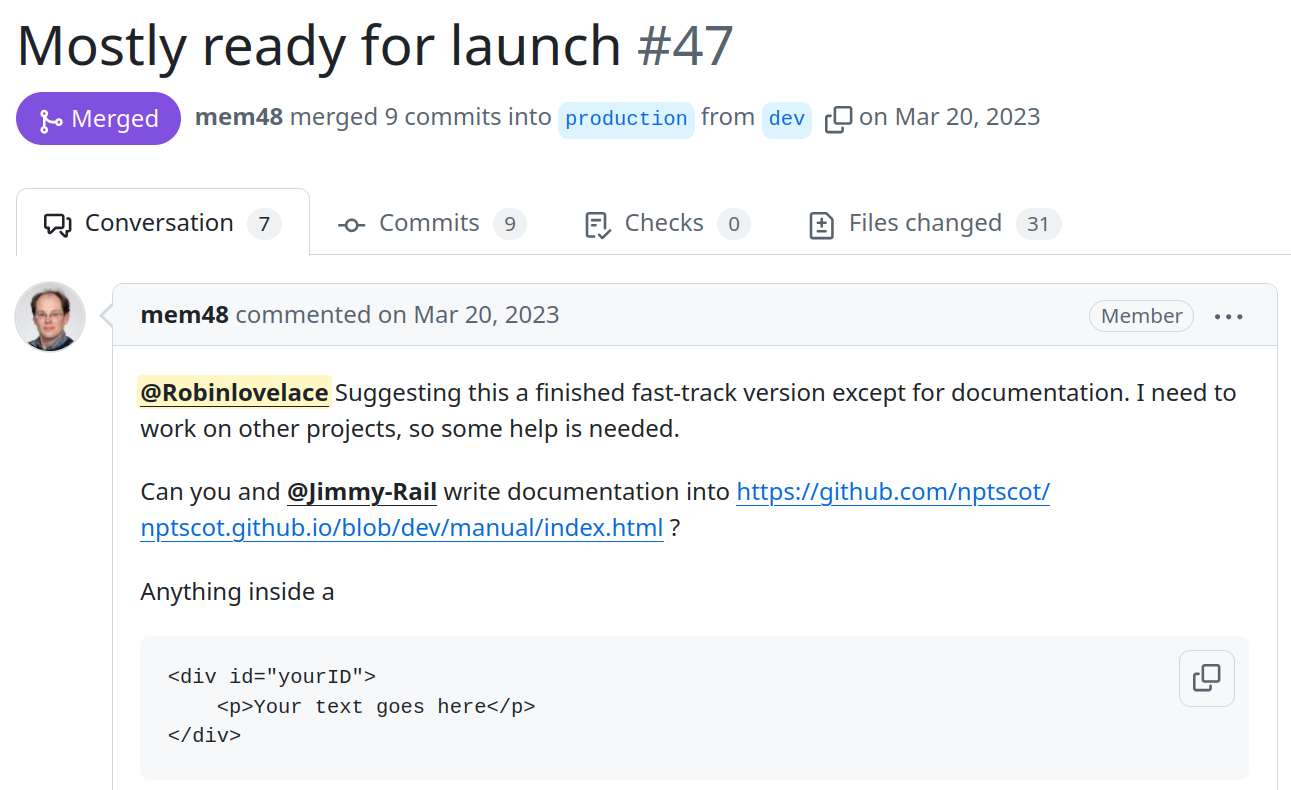
Deployment workflow of NPT
Based on workflow.yml file for GitHub actions.
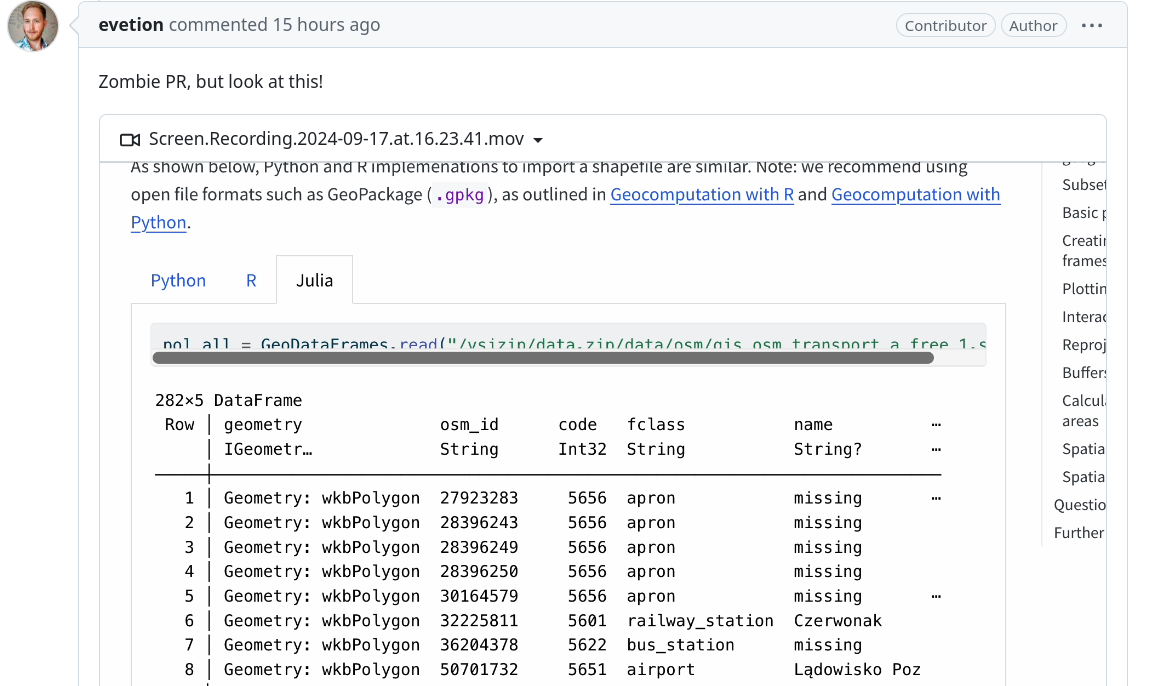
Adding new languages
Source: github.com/Robinlovelace/opengeohub2023
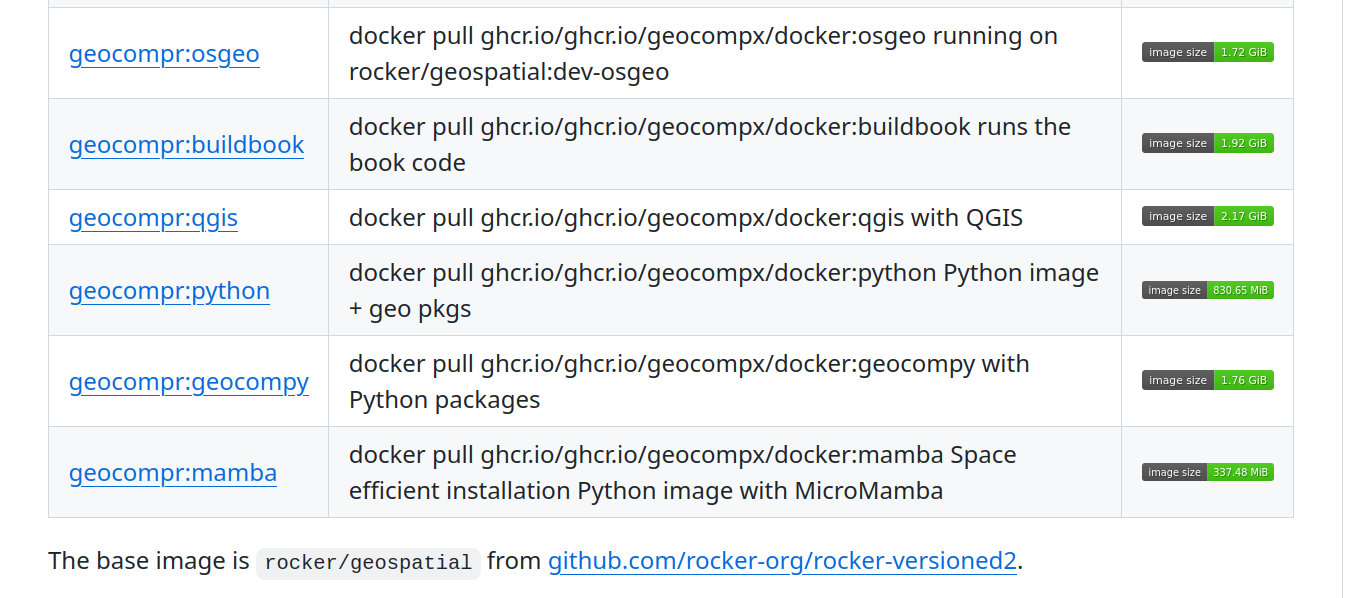
Containerisation
Source: github.com/geocompx/docker
Containerisation 2
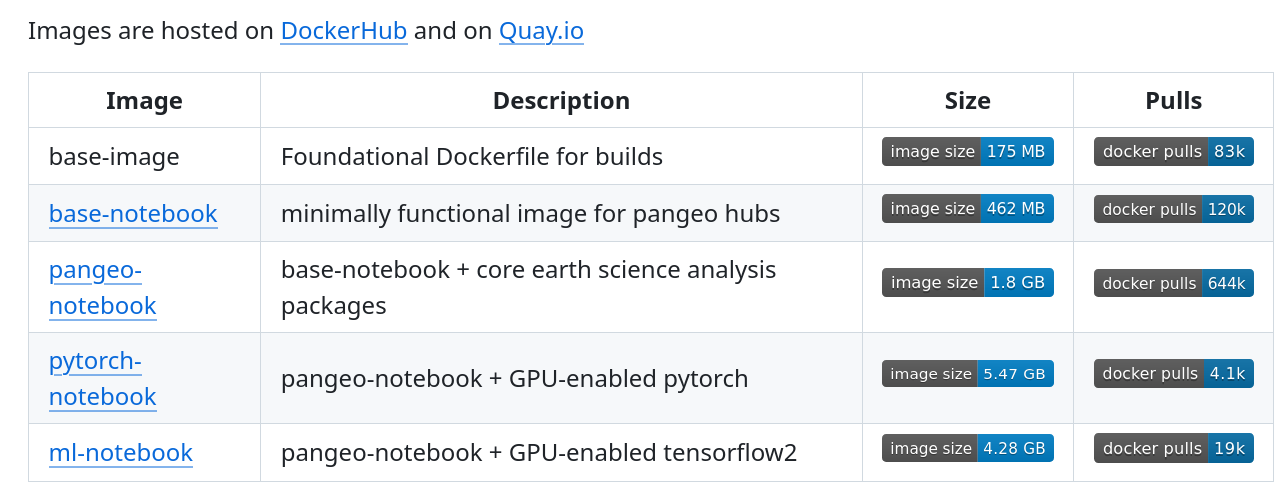
Source: pangeo-data/pangeo-docker-images
Containerisation 3
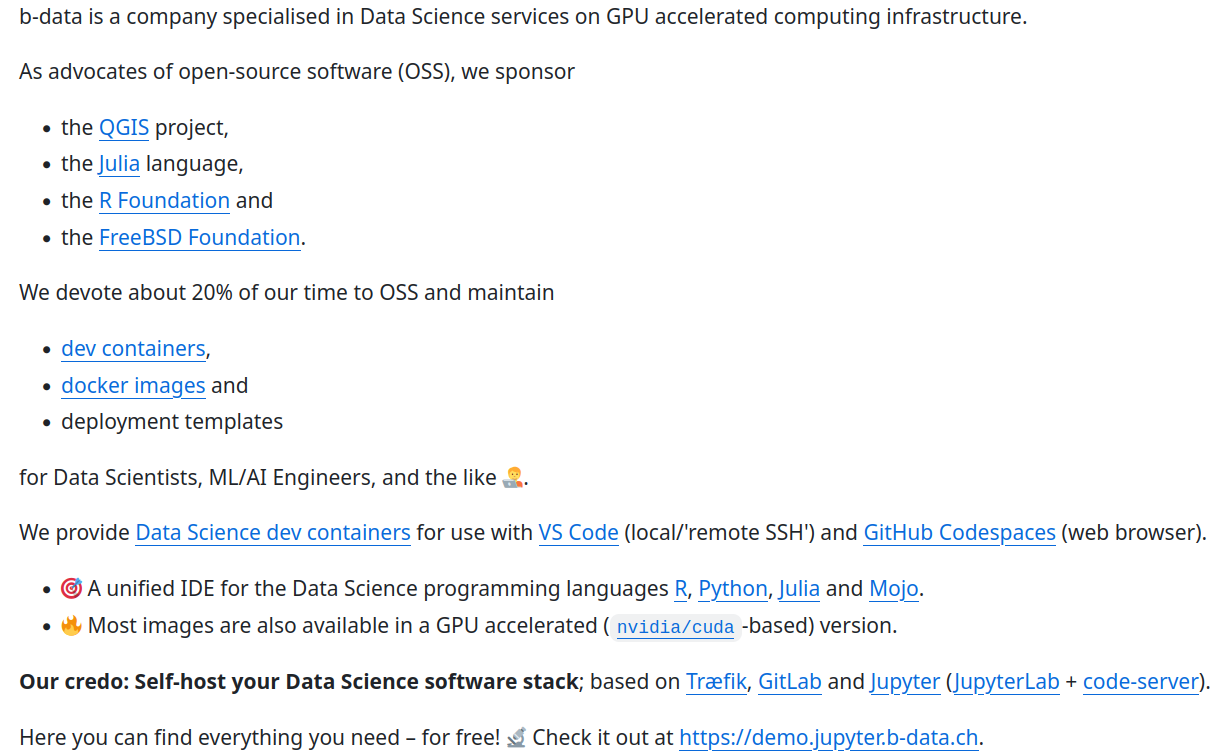
Source: https://github.com/b-data
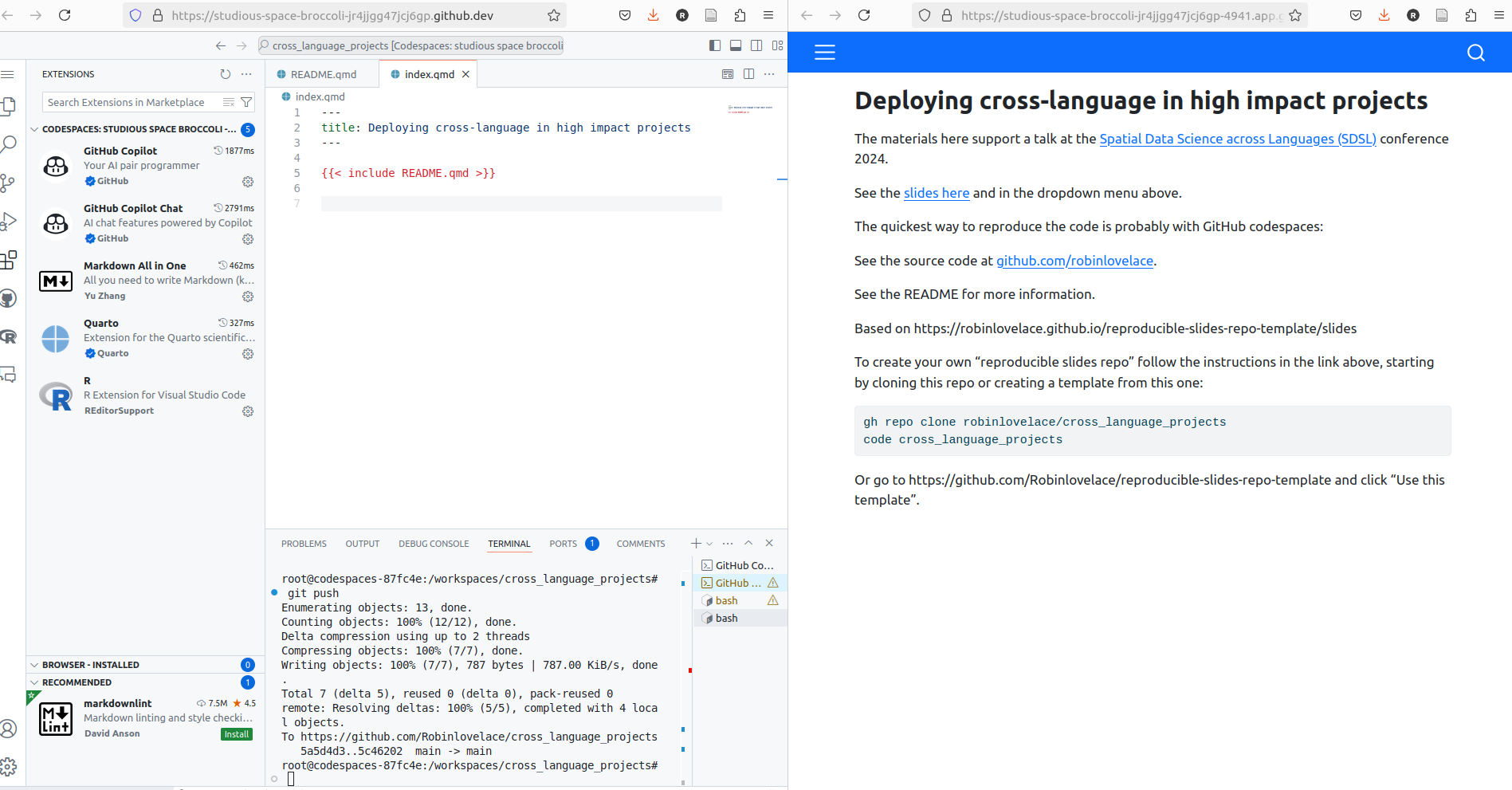
Quickstart: .devcontainer in GitHub codespaces
![]()
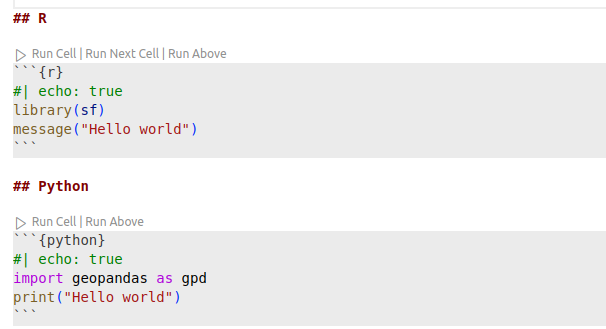
Cross-language tabsets
::: {.panel-tabset group="language"}
...
:::
Output
Setting-up gh-pages branch
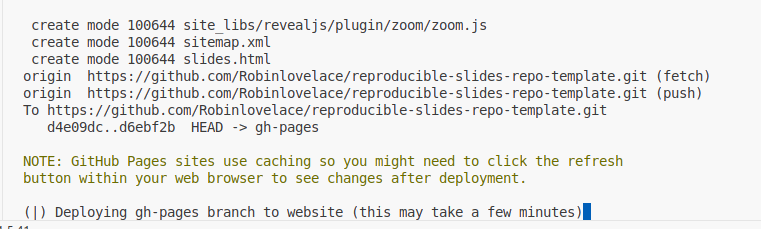
You can do this with a single quarto command:
Which leads to the following text and eventually auto-opens the deployed webiste!
The website
The previous command creates a gh-pages branch with the slides in the docs folder. This is then automatically deployed to GitHub Pages, and the website is opened in your browser when ready:
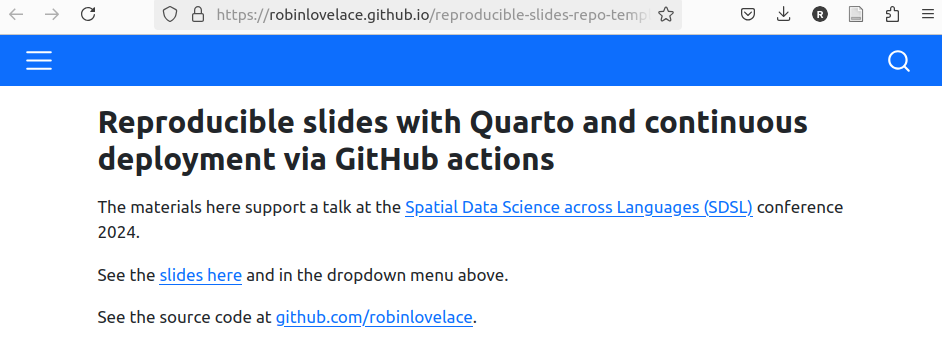
How awesome is that?
🤯🤯🤯
Debugging
Source of quarto publish gh-pages hint: Error message from GitHub Actions when trying to publish slides to GitHub Pages:
ERROR: Unable to publish to GitHub Pages (the remote origin does not have a branch named "gh-pages". Use first `quarto publish gh-pages` locally to initialize the remote repository for publishing.)
With the Quarto extension
- You need to be in Visual Editor mode (Ctrl+Shift+F4)
- Then it’s Ctrl+Shift+F8
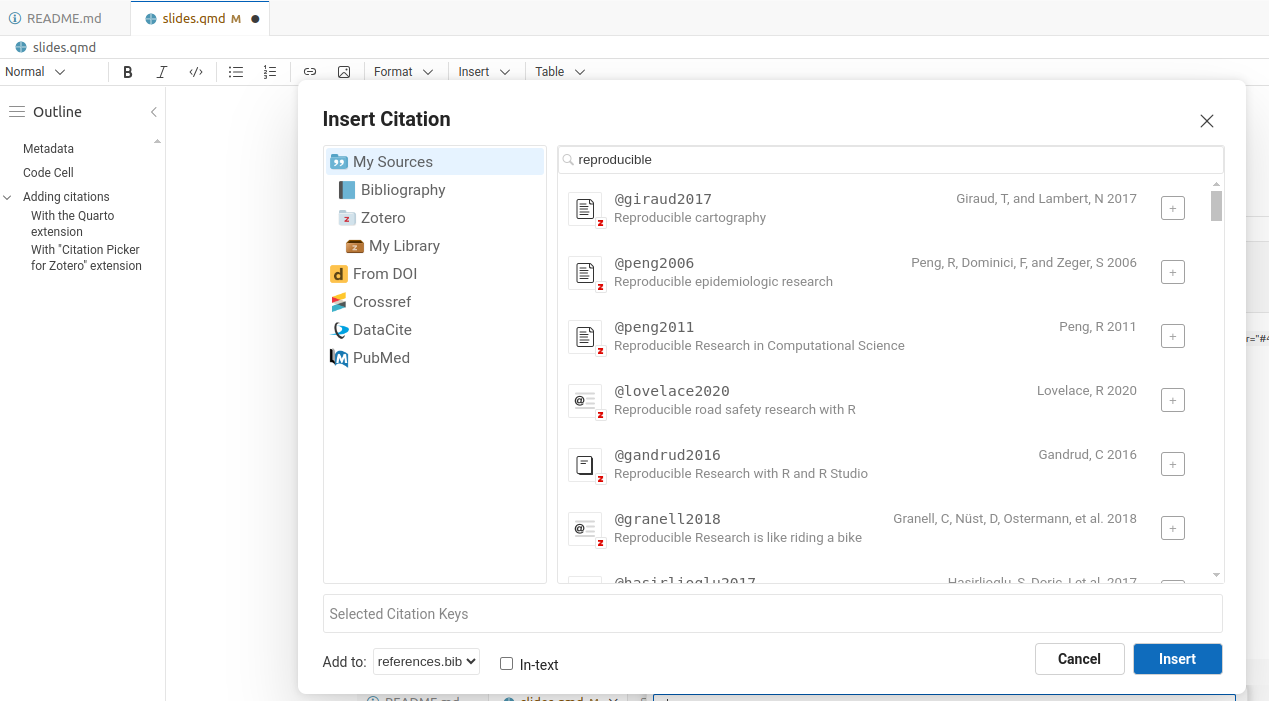
Creates citations like this: (Peng 2011)
With “Citation Picker for Zotero” extension
- Issue with this approach: doesn’t generate the .bib file
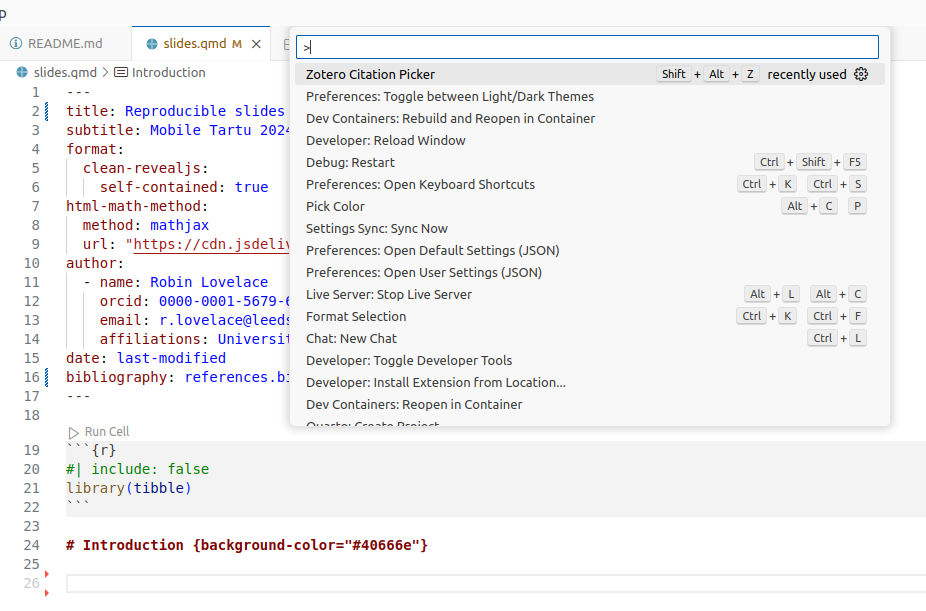
Alt+Shift+Z
Support in IDEs